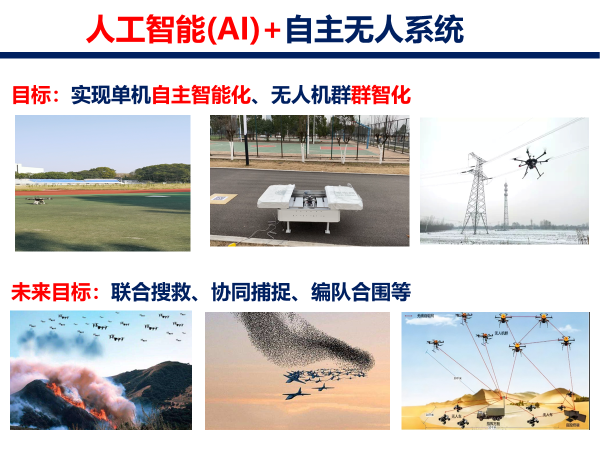
随着社会的进步与新一轮信息技术的快速发展,人们对无人系统的应用场景与自主能力需求越来越强烈。智能无人自主系统是人工智能的重要应用之一,其发展可大大推动人工智能技术的创新。通过新一代人工智能技术与无人系统技术深度融合,可以实现通过学习认知来增强物理系统的感知、计算分析与控制能力。为了落实这些要求,需要通过研究智能自主无人系统的智能行为与自主进化,揭示群智演化规律与涌现机制,实现智能自主无人系统等异构多智能体系统的协同控制、优化、博弈与基于交互与协作的自主智能进化。
该方向主要研究内容:类脑智能、群体智能控制和优化、多智能体强化学习中的博弈与均衡、自组织与自涌现机理、多智能体群体协同与决策及其在智能自主无人系统中的应用等。
实验条件:实验室具备支持多智能体编队控制的群体无人机、无人车,可满足自主无人系统编队系统控制实验需求。
地址:中国 · 湖北省 · 武汉市洪山区珞喻路1037号
华中科技大学南一楼中533 534
邮编:430074 | 电话:(+86) 027-87543130
© 2022 华中科技大学类脑智能与智能控制实验室